비즈니스 최적화
KPI와 병목 구간을 함께 정리해 우선순위와 실행 포인트를 명확히 합니다.


비즈니스 목표와 IT 실행 구조를 사용자 관점에서 다시 설계합니다.
KPI와 병목 구간을 함께 정리해 우선순위와 실행 포인트를 명확히 합니다.
의사결정자와 운영자가 함께 쓰는 인터페이스 기준을 정합니다.
ERP/WMS/MES와 피지컬 계층의 연결 구조를 설계합니다.
AI 기반 CI/CD 흐름으로 요구사항 정리부터 검증과 배포 준비까지 연결합니다.
요구사항과 예외를 구조화합니다.
통제 기준을 유지하며 구현을 가속합니다.
검증과 운영 이관을 하나의 루프로 묶습니다.

AI Agent가 시스템과 물리 환경을 동시에 조정하는 운영 구조를 설계합니다.

정책과 의사결정 기준을 AI Agent가 해석할 수 있도록 구조화합니다.
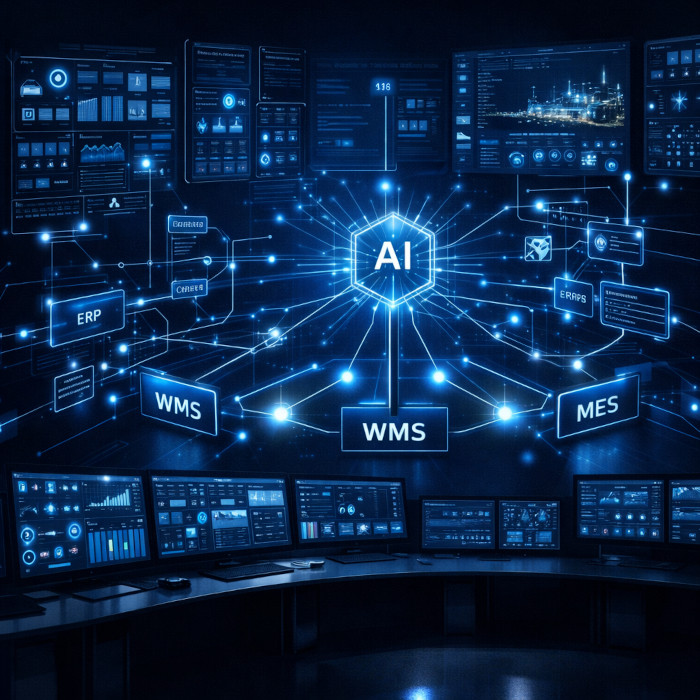
ERP/WMS/MES 액션을 하나의 운영 흐름으로 조율합니다.

피지컬 상태 피드백을 다시 의사결정 루프로 연결합니다.

ROS2를 중심으로 내비게이션, 상황 인지, 시뮬레이션, 에이전틱 컨트롤러를 하나의 실행 구조로 연결합니다.
공간 제약과 작업 흐름에 맞춰 이동 경로를 설계합니다.
물리 환경 상태를 제어 로직에 반영합니다.
실환경 적용 전 반복 검증 루프를 구성합니다.
실행 정책과 안전 조건을 하나의 제어 계층으로 조율합니다.